05. Estimation Problem Refresh
Refresh Estimation Problem
Definition of Variables
- x is the mean state vector. For an extended Kalman filter, the mean state vector contains information about the object's position and velocity that you are tracking. It is called the "mean" state vector because position and velocity are represented by a gaussian distribution with mean x .
- P is the state covariance matrix, which contains information about the uncertainty of the object's position and velocity. You can think of it as containing standard deviations.
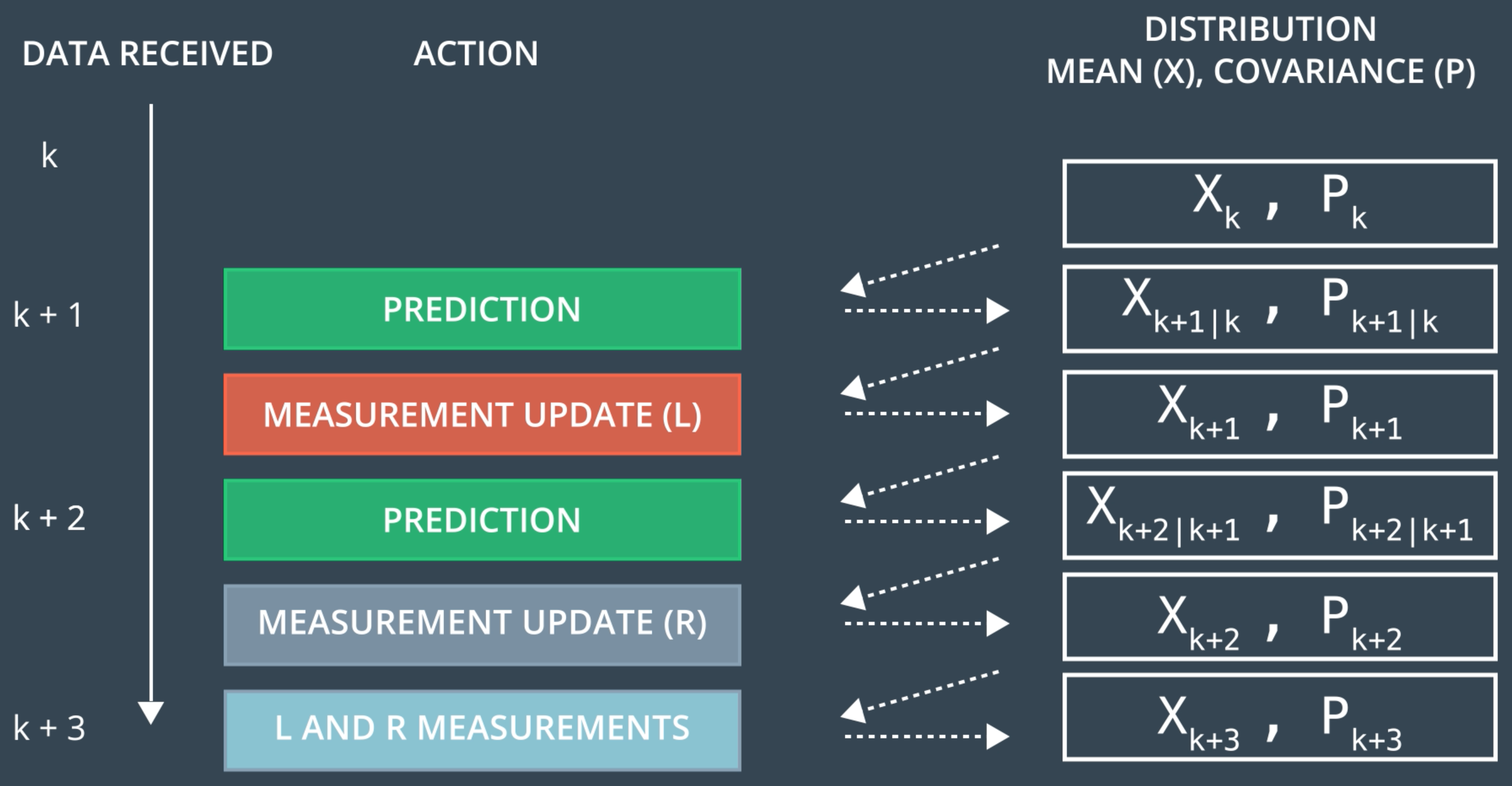
- k represents time steps. So x_k refers to the object's position and velocity vector at time k.
- The notation k+1|k refers to the prediction step. At time k+1 , you receive a sensor measurement. Before taking into account the sensor measurement to update your belief about the object's position and velocity, you predict where you think the object will be at time k+1 . You can predict the position of the object at k+1 based on its position and velocity at time k . Hence x_{k+1|k} means that you have predicted where the object will be at k+1 but have not yet taken the sensor measurement into account.
- x_{k+1} means that you have now predicted where the object will be at time k+1 and then used the sensor measurement to update the object's position and velocity.
asdf